Veröffentlichung eines Papers auf der ISMR 2019
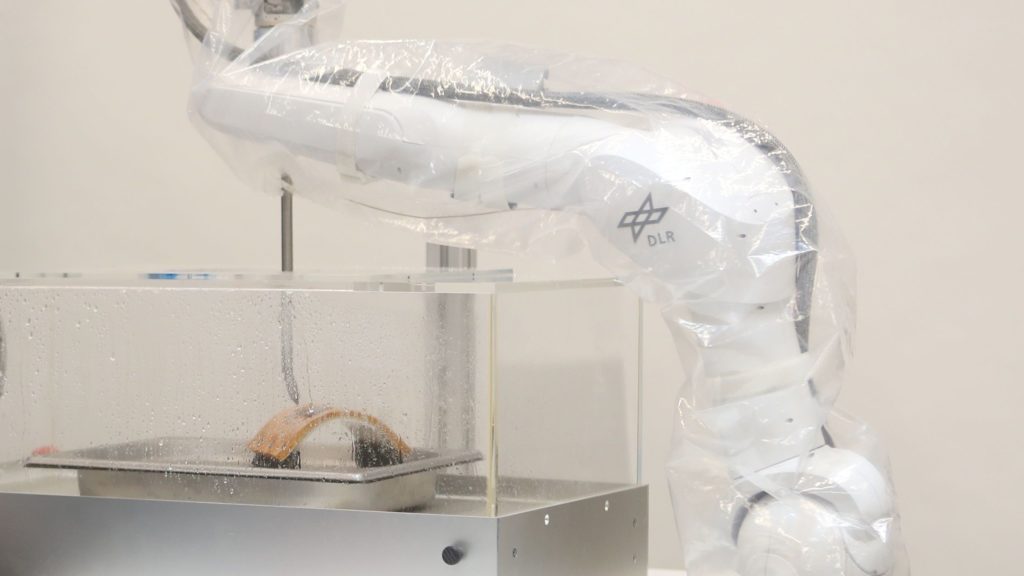
Die Wasserstrahlchirurgie hat sich als effiziente Methode zur chirurgischen Wundreinigung bewährt. Forscher des MIRO Innovation Labs vom DLR-Institut für Robotik und Mechatronik haben, basierend auf dem Roboterarm MIRO, ein System für die robotische Wundauswaschung mittels Wasserstrahl entwickelt. Zu diesem Zweck wurde ein robotisches Instrument mit einem integrierten Wasserstrahlapplikator konstruiert, welches der Chirurg an den Roboterarm MIRO anbringen kann. Andrea Schwier, Wissenschaftlerin des MIRO Innovation Lab–Teams, präsentierte ein Paper über das Design dieses Instruments auf dem internationalen Symposium für Medizinrobotik (ISMR 2019), welches vom 3. bis zum 5. April 2019 in der Akademie für Medizin in Atlanta, GA stattfand.
Der Wasserdruck des Wasserstrahlapplikators kann präzise eingestellt werden, um selektiv nur bestimmte Gewebe und Strukturen abzutragen. Da nekrotisches Gewebe mechanisch weniger belastbar ist, kann bei einer Wundauswaschung der Wasserdruck so gewählt werden, dass das nekrotische Gewebe entfernt wird, während das darunter liegende gesunde Gewebe intakt bleibt. Zwei integrierte Handgelenksfreiheitsgrade reduzieren die zu einem Flächenabtrag – wie z.B. bei einer Wundauswaschung – notwendigen Roboterbewegungen und erleichtern es, diesen minimalinvasiv durchzuführen. Durch eine integrierte Absaugung wird eine verbesserte Abtragwirkung erzielt und potentiell das Risiko für eine Streuung von Krankheitserregern durch in die Luft dissipierte Wasserpartikel verringert.
Das auf dem ISMR 2019 vorgestellte Paper beschreibt das Design des Instruments und Tests zur Funktion der integrierten Absaugung. Außerdem wird ein Konzept für die weitere Erhöhung der Schwingungsfrequenz der Instrumentenspitze und damit der Abtragleistung präsentiert, welches auf einer Kombination eines Vibrationsmotors mit einem flexiblen Element basiert.
Mehr Informationen und das vollständige Paper finden Sie unter:
Design of a robotic instrument for minimally invasive waterjet surgery