Publication of a paper at the ISMR 2019
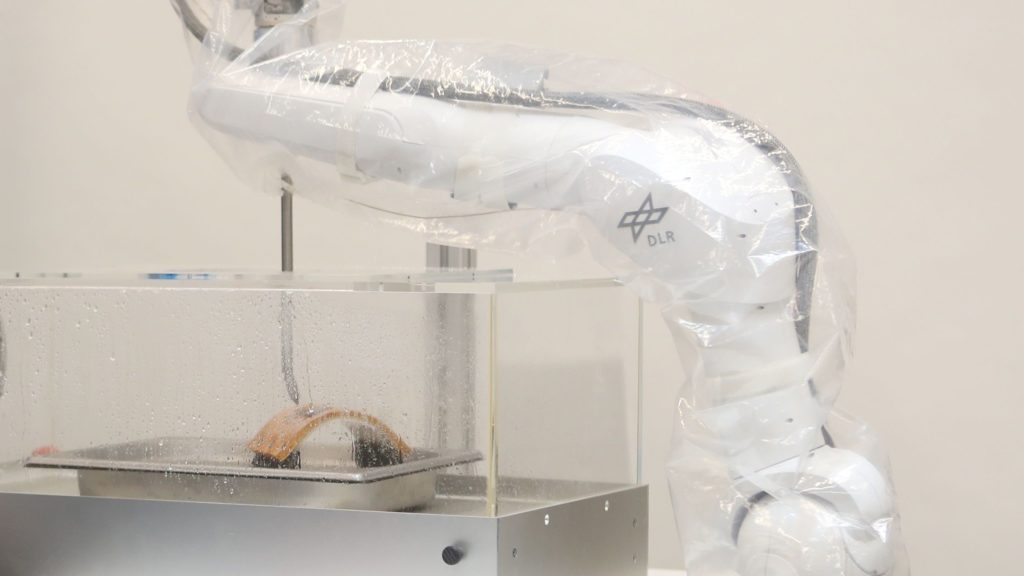
Waterjet surgery has proven to be an efficient method for wound cleansing. Scientists from the MIRO Innovation Lab of the Institute of Robotics and Mechatronics of the German Aerospace Center have developed a system based on the MIRO technology for robotic wound debridement by means of a waterjet. For this purpose a robotic instrument with an integrated waterjet applicator has been constructed, which the clinician can attach to the robotic arm MIRO. Andrea Schwier, scientist of the MIRO Innovation Lab–Team, presented a Paper about the design of this instrument at the International Symposium on Medical Robotics (ISMR) that was held at the Academy of Medicine in Atlanta, GA, from 3-5 April 2019.
The water pressure of the waterjet applicator can be adjusted very precisely, so that selective ablation of certain tissue and structures is possible. Necrotic tissue, being mechanically less resilient, can be removed by setting the water pressure to a level at which only the necrotic tissue is ablated, while the healthy tissue underneath remains intact. Two integrated degrees of freedom of the wrist reduce the necessary robot movements needed for an ablation – for example for wound debridement – and support the minimally invasive approach. In addition, integrated suction ensures better ablation effects and potentially reduces the risk of scattering pathogens due to water particles being dissipated into the air during procedure.
The paper introduced at the ISMR 2019 describes the design of the instrument and tests of the integrated suction function. Furthermore, a concept – based on the combination of a vibrating motor with a flexible element – for further increasing the oscillation frequency of the instrument tip and therefore also increasing the ablation performance is shown.
For more information and the full paper follow this link:
Design of a robotic instrument for minimally invasive waterjet surgery